 首页
首页
 项目介绍
项目介绍
 生鲜肉
生鲜肉
 加工肉
加工肉
 副产品
副产品
 未来肉制品
未来肉制品

三段式分割
20世纪50年代前,养猪多为农户传统副业,猪肉屠宰加工大多停滞在手工作坊。改革开放前,我国猪胴体基本不分割,劈半分割后就进入市场销售。 20世纪70年代,我国开始建立了冻猪分割肉车间,对猪肉分割技术有了一定的了解和重视。
根据我国1988年颁布的CG9959.3-1988《分部位分割冻猪肉》,猪肉按不同部位分割成去骨前腿肉、去骨后腿肉、大排、带骨方肉4块。而CG9959.4-1988《分割冻猪瘦肉》将猪肉分割成颈背肌肉(Ⅰ号肉)、前腿肌肉(Ⅱ号肉)、大排肌肉(Ⅲ号肉)和后腿肌肉(Ⅳ号肉)。传统三段式分割是将一片胴体经过特殊设备可以分割成前、中、后三段。前段与中段分割位置从前腿方向,第四与五根肋骨之间;中段与后段分割是尾骨1至1.5个关节处。
以如皋肉联厂分割冻猪肉为例,猪胴体分割主要需要五刀:
● 硬件布置
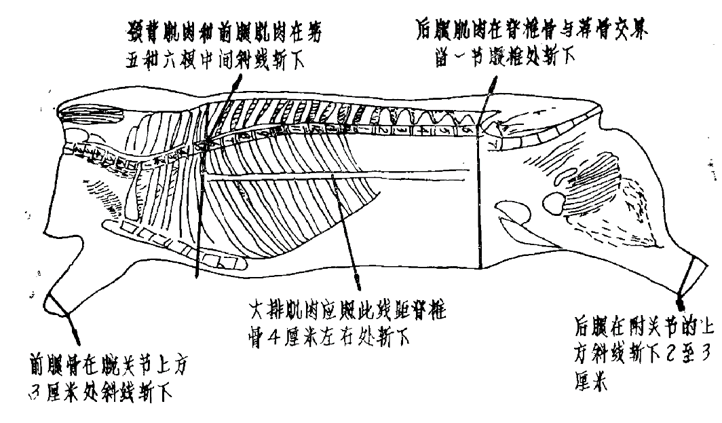
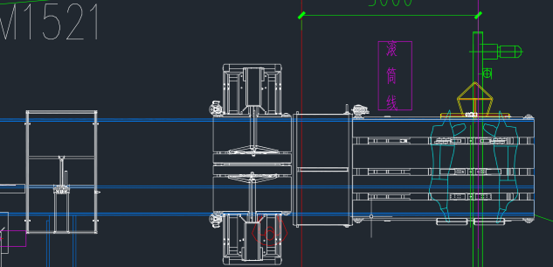
如皋肉联厂分割冻猪肉示意图
第一刀:从胸部肋骨第五、六根中间斩断脊髓骨后,将前脚向左拉一把,刀口偏向第六根肋骨处向后斜刀斩下前夹心,使前腿肌肉上的小叶多带一些肌肉。根据原料情况采取机动调正开割线的方法,在规格无损的前提下,充分利用原料。如猪身较大,肌肉发达的肉片,就在第五根肋骨开割,这样既做了颈背肌肉和前腿肌肉,又能加工出排骨。猪身段小的可在第六根肋骨开割,放弃大排肌肉,或在第4,5根肋骨处开割,放弃颈背肌肉,做大排肌肉。
第二刀:从腰椎和荐椎连接处(留一节腰椎)斩断后把尾椎骨割除(不能损坏后腿上的肌肉),即为后腿肌肉原料。
第三刀:在脊椎骨下肋约4厘米处平行斩下,即为大排肌肉原料。操作时用刀口的后部垂直斩断肋骨后,用刀口由后向前开割。
第四刀:斩前脚圈,从腕骨以上斜的方向斩下3厘米左右,使脚圈上少带肌肉或不带肌肉为宜。
第五刀:斩后脚圈,从后腿的附关节的上方,向斜的方向斩下3厘米左右为宜。
智能三段分割硬件设计与建模分析
① 一套脱钩装置,将胴体卸载于本设备接料流水线;
② 一套带固定卸载胴体功能的升/降装置;
③ 一套切割定位系统,通过相机,定位分割位置;
④ 一套用于前、后腿切割的移动式圆盘刀装置;
⑤ 一套用于安装照相、灯光的悬挂装置;
⑥ 一套PLC控制系统的,控制设备正常运转和急停。
1)硬件设计参数阐述:
结合分割车间产能需要,分割线速设计目标:450头/时,即1头/8秒,4片/秒,胴体宽度650mm、单片胴体45kg。
落料线体:链轮φ175毫米,电机1450转/分钟,减速机速比20,移动距离1000毫米>胴体宽度650毫米,满足需求。
随动切割部分:随机采集193片中段长度信息,具体如下:
设备采集中段长度信息
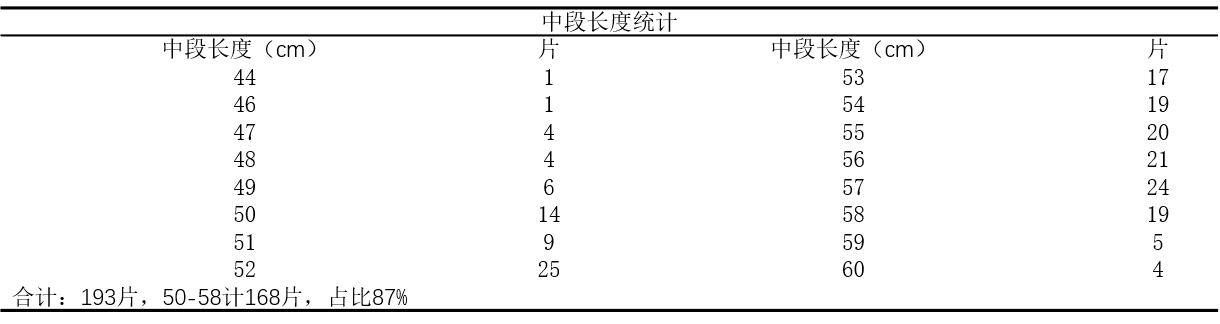
中段长度430-610毫米,其中500-580占比80%,圆盘锯的原点位距中530毫米;锯移动范围405-650毫米,满足需求。
移动速度:设定移动相应时间1.5秒,锯单边最大移动距离90毫米,移动速度60毫米/秒,电机转速1500转/分钟,减速机速比3,即8转/秒,丝杠螺距10毫米,丝杠螺母速度80毫米/秒>60毫米/秒,满足使用要求。
线体速度:即切割速度1片/1.5s;链轮φ175毫米,电机1440转/分钟,减速机速比20,移动距离990毫米>胴体位移950毫米,满足需求。
2)建模分析:
①3D简图
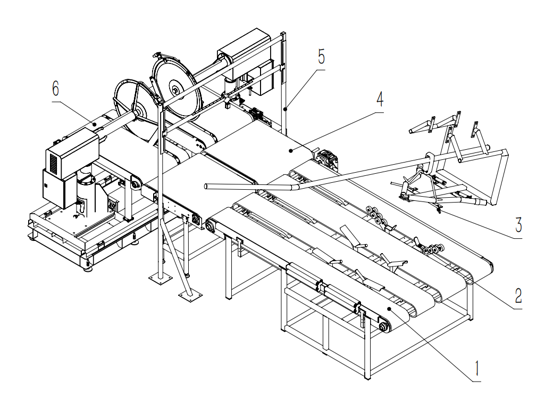
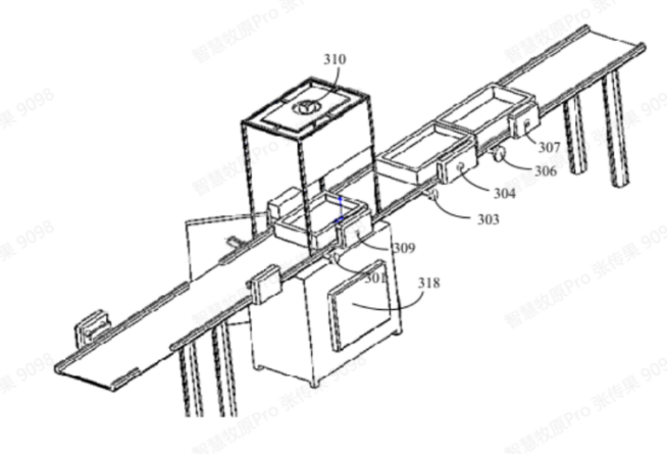
智能三段分割硬件3D简图(上图中各零件分别表示:1-下料线体;2-自动脱钩装置;3-胴体校正装置;4-拍照线体;5-相机及光源装置;6-随动切割装置)
注:各个结构说明:1、下料线体:用于接胴体,之后转运至拍照线体;2、自动脱钩装置:将胴体从扁担后脱离下来的装置,主要由两个旋转拨杆组成;3、胴体校正装置:具有上升主要有两个作用:一是保证胴体落在链板时姿态一致,二是让脱钩后的两片胴体不发生相对位移;4、拍照线体:主要是作为拍照载体;5、相机及光源装置:主要是采集胴体信息,将信息传输给电脑;6、随动切割装置:可以依据胴体分割位置,将横切圆盘锯移动到该位置的装置。
②动作逻辑
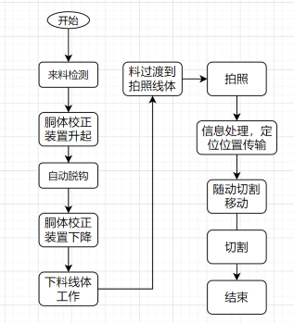
智能三段分割硬件动作逻辑设计
智能三段分割软件系统设计布置
1)分割肉全局参数特征提取
全局参数主要分为显性参数和隐性参数特征;其中显性参数通过立体视觉技术获取,隐性参数可以通过平面视觉技术获取。隐性参数特征判断方法之一是采用卷积神经网络来实现,算法原理及验证效果如图所示。此外,也可以引入传统图像算法的脂肪含量等参数进行检测。
(1)图像标准化;
(2)图形间隔采样并沿通道拼接;
(3)卷积层提取特征;
(4)过全连接和SoftMax分类器给出识别结果。
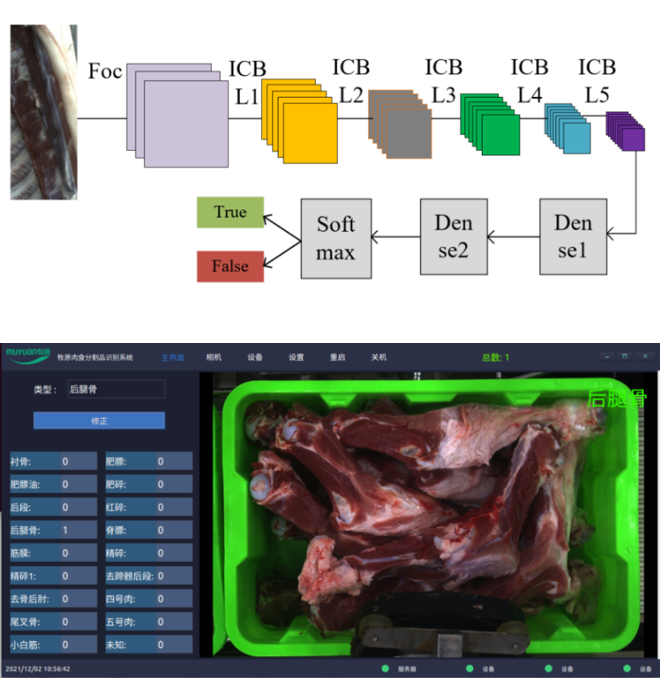
分割肉全局隐性参数特征提取
1)显性特征提取以肋排特征参数提取方面,可以通过三维立体点云数据获取到肋排对应区域的长宽高尺寸,同时对肋排的区域面积大小进行算法提取研究,见下图。
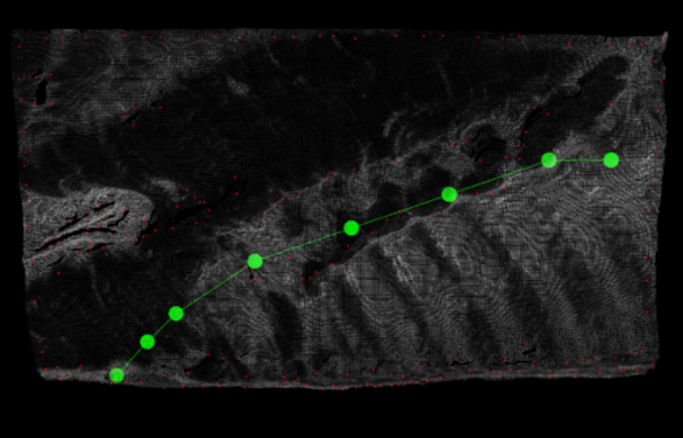
分割肉全局显性参数特征提取
2)基于深度学习的智能分类分级系统搭建
图像采集系统搭建→随线自动采集分级数据→建立不同类别对应的分级标准体系→形成一套分割品猪肉分级分析系统。
分割肉分类定级数据自主采集和分析系统
3)目标定位和姿态求解技术
自主分拣机器人研发汇总需要对目标物体的位置和姿态信息进行求解,采用YoloV3目标检测算法进行目标定位,整个YoloV3可以分为三个部分,分别是Darknet53,FPN以及Yolo Head。Darknet53是YoloV3的主干特征提取网络,输入的图片首先会在Darknet53里面进行特征提取,提取到的特征可以被称作特征层,是输入图片的特征集合。在主干部分,获取了三个特征层进行下一步网络的构建,这三个特征层称为有效特征层。FPN可以被称作YoloV3的加强特征提取网络,在主干部分获得的三个有效特征层会在这一部分进行特征融合,特征融合的目的是结合不同尺度的特征信息。在FPN部分,已经获得的有效特征层被用于继续提取特征。Yolo Head是YoloV3的分类器与回归器,通过Darknet53和FPN获得三个加强过的有效特征层,其shape分别为(52,52,128),(26,26,256),(13,13,512)。每一个特征层都有宽、高和通道数,此时每一个特征图为特征点的集合,每一个特征点都有通道数个特征。Yolo Head对特征点进行判断,判断特征点是否有物体与其对应。整个YoloV3网络所作的工作就是特征提取-特征加强-预测特征点对应的物体情况。
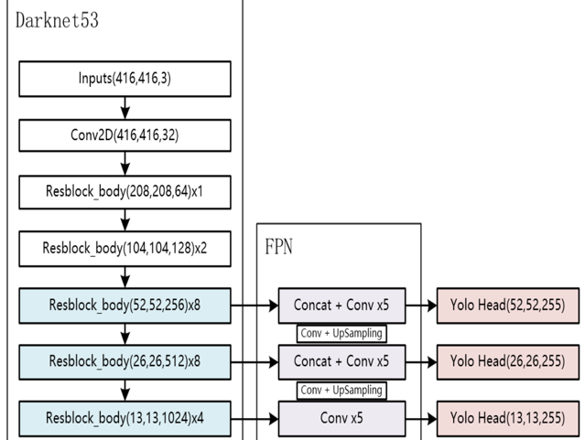
目标检测YOLO模型
4)机器人视觉手眼标定算法
通过计算机视觉算法提取出目标物体在图像上的位置之后,需要转换为机器人坐标系下的位姿,通过手眼标定计算出相机坐标系与机器人坐标系的转换关系;为实现视觉引导机器人完成分拣动作,需要估计在机器人坐标系下相机的位置,该技术通过4点标定法来完成转换矩阵的计算。该项目中采用Eye-to-Hand的方式即相机安装在机器人本体外的固定位置,在机器人工作中不随机器人一起运动。该问题是一个求解AX=XB的问题,其中X是4*4的齐次变换矩阵。最后根据点云算法提取出视觉坐标系下的路径点位以及X,求解出机器人坐标系下的位姿。
手眼标定原理如下图所示。
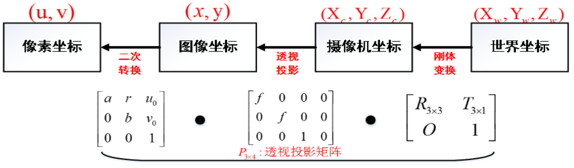
手眼标定的坐标转换原理
5)机器人视觉软件系统研究
对于该工业视觉软件系统来说分为不同模块:图像采集模块,算法调用模块,用户界面模块,通信模块;以上模块形成整套的机器人视觉软件系统。而且归属于工业软件系统,完全基于linux系统下完全自主知识产权开发软件,VS环境的C++实现,可以防止在卡脖子问题出现时的工业软件运行问题。
智能三段分割设备安装调试
智能三段分割设备进厂安装,具体厂区按照平面布局图以及设备改造前后效果图如下:
厂区按照平面布局图

智能三段分割设备改造前效果图
智能三段分割设备改造前效果图
新切割工艺研发
猪胴体分割常采用三段式分割,即分别从第4至5根肋骨间和尾椎第二骨节处下刀,将胴体分为前、中、后三段。随后将中段肉进一步分割获得五花肉,肋排和脊骨。五花肉位于猪的胸腹部,与背最长肌相接,具有肥瘦相间,口感嫩滑的优点,深受消费者喜爱,价格也相较普通猪肉更高。传统的三段式分割在前段和后段常残留少部分五花肉,通常分别称为前五花肉和后五花肉。这会破坏五花肉的完整性,并造成五花肉利益损失。因此,若能开发一种新的半胴体分割工艺,可将前、后段胴体的五花肉同中段五花肉完整分割,则可以在不影响胴体剩余部分进行三段分割的同时,获得更高的五花肉产量,显著提升胴体的分割利益。
由此,设计的五花肉优先整取分割的新分割工艺如下图所示。先将胴体五花肉完成分割,再进行三段分割。
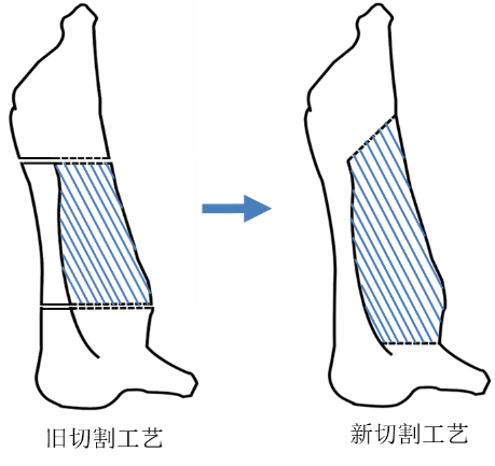
五花优先整取切割工艺示意图
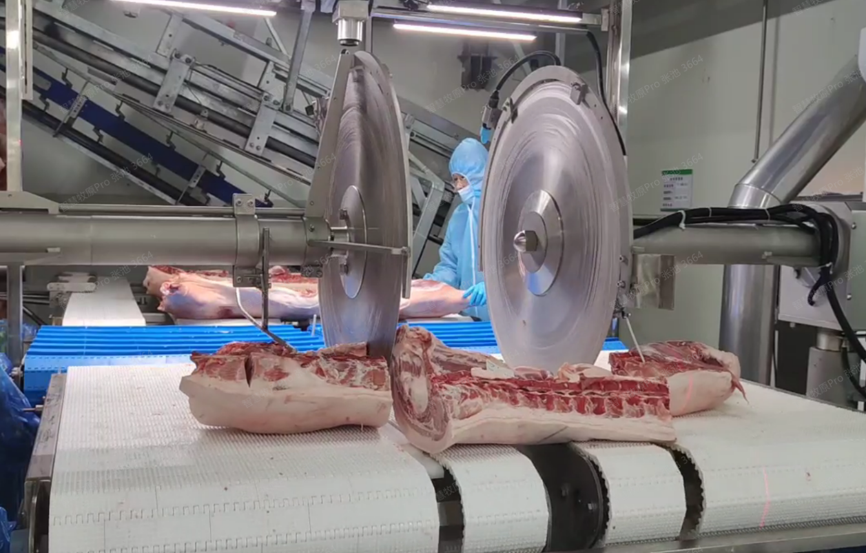
这一方法可在生产中根据需求调整五花肉大小,增加生产灵活性。基于这一设计,在分割车间进行实操,如下图所示,证明了其可行性。

新切割工艺切割试验
确定关键切割位点并建立胴体尺寸函数关系
关键切割位点确定
人工切割五花肉分为两个主要步骤,即五花肉轮廓切割和五花肉肋骨分割。在进行五花肉轮廓切割时,需参照胴体内腔侧和外皮侧各部位的相对位置,如脊骨、肋排、臀部和前腿等,确定五花肉所在区域,规划切割路径,然后下刀切割。首先胴体处于倒挂状态,由胴体腹部五花肉边缘区域下刀,此区域五花肉为三角形,故切割路径为由腹部斜切向五花肉与背肌的边缘。在胴体背部,五花肉与胴体背最长肌相接,这一分界线与脊骨走向高度相关,因此可以通过从胴体内腔侧观察脊骨位置,而确定五花肉-背肌分割路径。沿此路径向胴体肩部切割,至前五花与前腿交界处,由脊骨向胸部边缘横向切割,由此完成了五花肉轮廓的切割。五花肉与肋排相接的面为曲面。分割工人分割五花肉与肋排时,将这一曲面通过约10次的往复切割,由胴体腹部的肋排起始位置逐渐分割至胸部的五花边缘,完成分割。这一切割方法将复杂曲面微分为了多个曲线切割轨迹,简化了切割轨迹,降低切割难度。
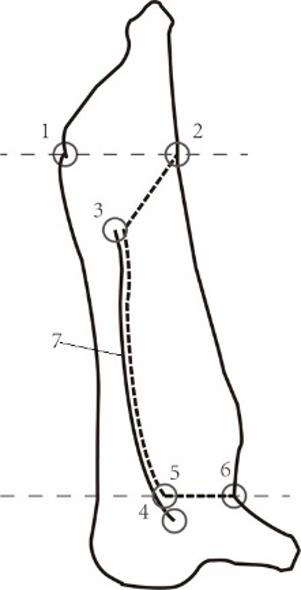
然而,胴体间存在个体差异,且胴体外皮侧缺乏显著定位标识协助确定胴体内部结构。因此在智能设备中如何自动提取胴体各部位位置信息,是自主规划切割路径的关键步骤。本技术确定了如下图所示的关键切割位点,包括肛门,尾椎,腋窝,第一肋骨。在确定以上位关键切割点后可依此规划五花肉轮廓的切割轨迹。
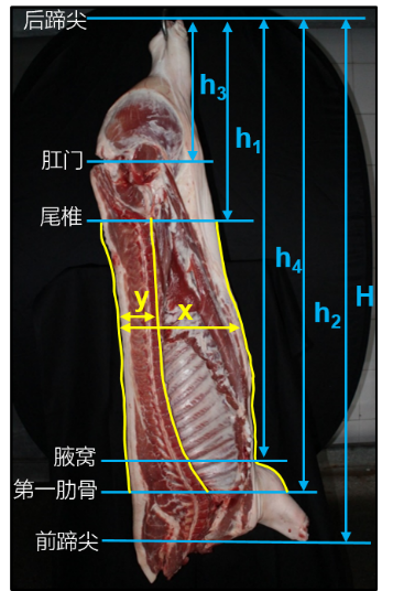
胴体尺寸函数关系示意图
探究胴体尺寸函数关系
通过对分割车间一定数量的猪胴体进行测量与图像采集,建立了胴体长宽度尺寸关系函数。长度关系函数是指:由胴体后蹄尖至前蹄尖的竖直距离确定胴体总长度;肛门、尾椎骨、第一肋骨、腋窝分别至后蹄尖的竖直距离与胴体总长度的比值构成的肛门长度关系函数、尾椎骨长度关系函数、第一肋骨长度关系函数、腋窝长度关系函数,或者肛门、尾椎骨、第一肋骨、腋窝分别至前蹄尖的竖直距离与胴体总长度的比值构成的肛门长度关系函数、尾椎骨长度关系函数、第一肋骨长度关系函数、腋窝长度关系函数。
长度关系函数获取方法为:
(1)测量倒挂状态下多片胴体的肛门、尾椎骨、第一肋骨、腋窝、前蹄尖分别与后蹄尖的竖直距离;
(2)计算每片胴体的肛门、尾椎骨、第一肋骨、腋窝分别到后蹄尖的竖直距离与后蹄尖到前蹄尖竖直距离的比值;
(3)拟合多片胴体的比值数据分别获得肛门长度关系函数、尾椎骨长度关系函数、第一肋骨长度关系函数、腋窝长度关系函数。
宽度关系函数获取方法为:
(1)将倒挂状态下多片胴体的尾椎骨到第一肋骨间的竖直距离M等分,M为不小于1的自然数;
(2)测量每片胴体包含尾椎骨和第一肋骨共M+1个水平高度位置处的胴体宽度、以及脊骨到胴体背部的距离;
(3)计算每片胴体的M+1个水平高度位置处的脊骨到胴体背部的距离与该同水平高度位置处的胴体宽度的比值;
(4)分别拟合多片胴体的比值数据获得M+1个水平高度位置处的宽度关系函数。
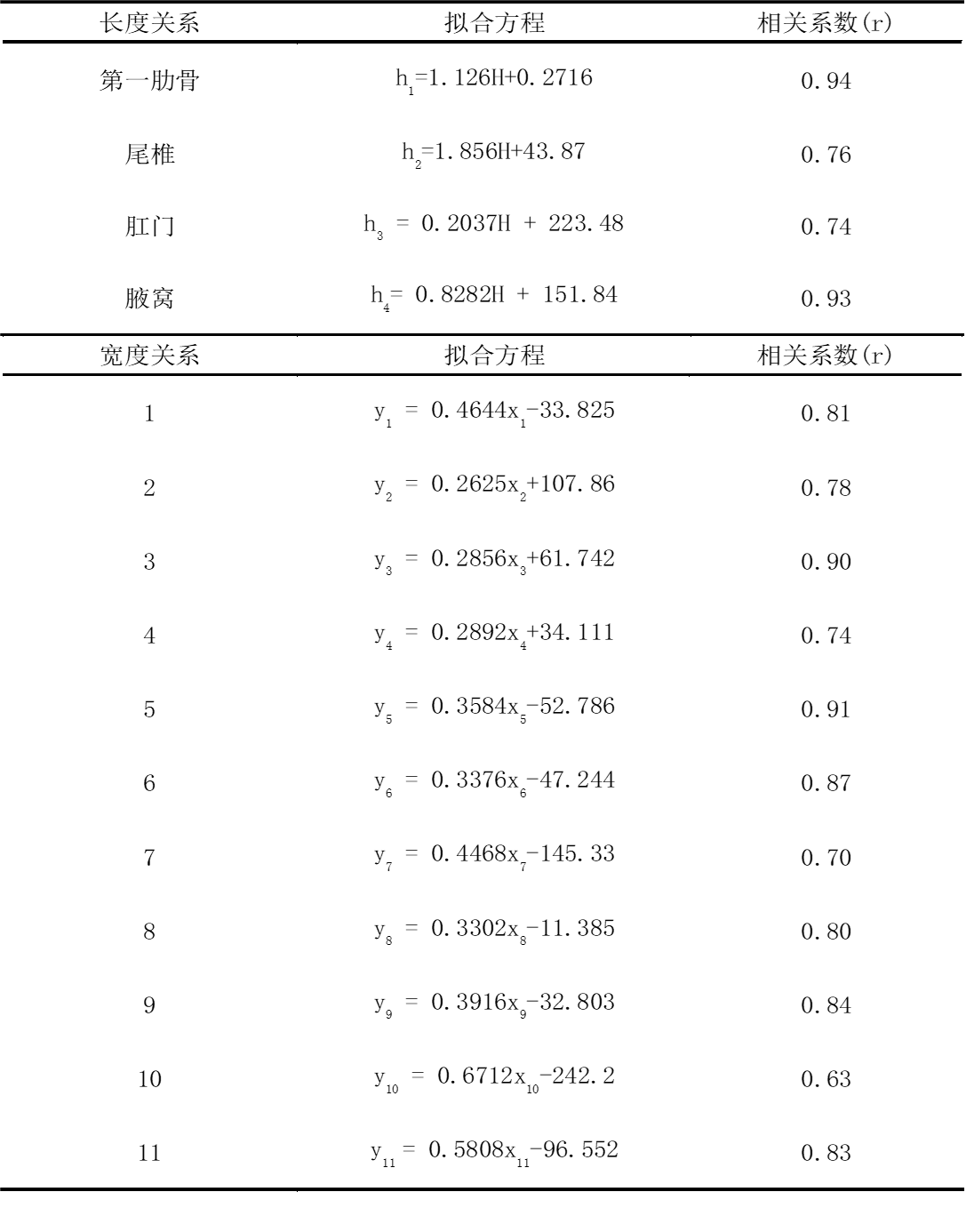
按照上述方法,所获得的胴体总长、总宽与关键切割位点的函数关系如表所示,胴体长宽度函数关系所示。
胴体长宽度函数关系
胴体尺寸函数关系验证
基于以上尺寸函数关系,取未参与函数拟合的样本进行了验证,验证结果如下图所示。通过胴体内腔和外皮图像的验证结果可知,该函数关系可以准确定位胴体脊骨、肛门及腋窝位置。
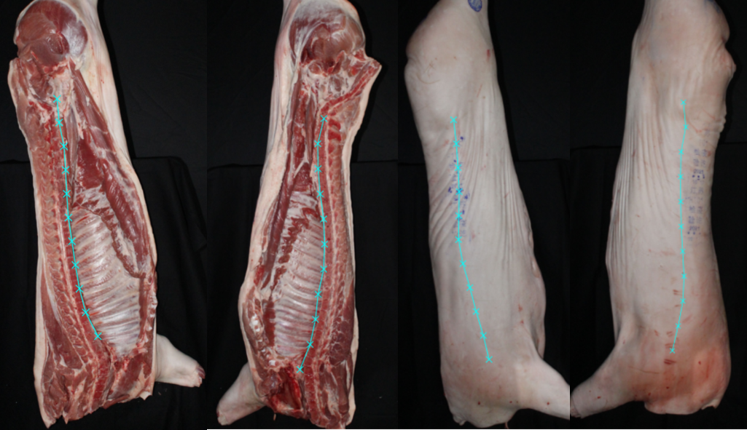
胴体尺寸函数关系验证
胴体图像处理及轨迹规划程序
五花肉切割轨迹自动规划程序
基于以上工作,本技术提出了一种猪半胴体五花肉轮廓切割路径自主规划系统,如下图所示,具体步骤如下:
(1)将倒挂状态的猪半胴体固定后,自动采集外皮侧图像,获得胴体总长度与胴体宽度;
(2)将胴体总长度代入相应位置处的长度关系函数,获得倒挂状态下胴体的肛门、尾椎骨、第一肋骨和腋窝的水平高度;
(3)将尾椎骨至第一肋骨的竖直距离进行N等分,获得包括尾椎骨和第一肋骨的N+1个水平高度的胴体宽度信息,N为不小于1的自然数;
(4)将N+1个水平位置的胴体宽度信息代入相应位置处的宽度关系函数,确定N+1个水平高度的胴体脊骨位置点,连接获得完整的胴体脊骨位置;
(5)以肛门的水平高度与胴体腹部轮廓的交点作为切割起点、胴体脊骨与尾椎骨水平高度的交点作为第一切割拐点、胴体脊骨与腋窝水平高度的交点作为第二切割拐点、腋窝水平高度与胴体腹部轮廓的交点作为切割终点;
(6)依次连接切割起点、第一切割拐点、胴体脊骨、第二切割拐点和切割终点,获得完整的五花肉轮廓切割路径。
自主规划系统通过多样本训练获得猪胴体不同位置间的尺寸函数关系;在生产中通过自动采集半胴体外皮侧图像提取获得胴体总长度和总宽度,并结合尺寸函数关系确定胴体详细尺寸信息,确定五花肉轮廓切割路径关键信息,规划完整五花肉的切割路径;该自主规划系统能够实现自动化路径规划,增加五花肉产量,有助于提高生产效率和猪胴体分割利益,并且可根据生产需要对五花肉区域大小进行调整。
五花肉轮廓切割轨迹规划示意图
图像处理程序
机器视觉是通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统并转变成数字化信号。图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。机器视觉系统具有高灵活性和高自动化程度,可广泛应用于食品安全检测、食品加工监测、异物检测等领域,在一些不适于人工作业的危险工作环境或者人工视觉难以满足要求的场合,替代人工视觉。也是一种更快、更高效,更安全的工作方法。
实现高精度的无人化智能分割,需借助机器视觉技术逐一获取切割对象的尺寸信息,规划相应的切割路径。因此需要开发一套适用于生产的图像采集方法和图像处理程序。首先,我们确定了猪半胴体图像采集环境应为黑暗环境,黑色背景,白色光源,且背景及胴体表面无严重反光。这一环境有利于突出胴体边缘,准确提取胴体尺寸。随后,基于Matlab平台建立了图像处理程序,通过半胴体外皮图像提取胴体长宽。结合以上轨迹规划系统开发了猪胴体智能分割平台。将猪胴体外皮侧图像导入其中,则可自动进行图像识别、关键切割位点确定,并规划五花轮廓切割轨迹和胴体三段切割轨迹。图像处理程序分为左、右半胴体处理程序。按照语言处理图像,左半胴体结果如下图(左)所示,轨迹规划如下图(中)所示,猪胴体智能分割平台如下图(右)所示。
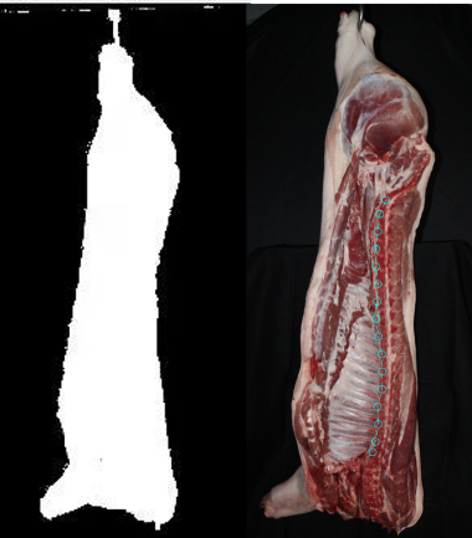
胴体图像处理结果

胴体五花轮廓切割轨迹验证

猪胴体智能分割平台
猪胴体智能化分割方法
基于以上研究成果,集成为一种自动化分割方法主要包括测量建立尺寸关系函数和自动智能分割两部分,如下图所示,包括以下步骤:
(1)对同一品种的胴体通过长度与质量进行分级;
(2)测量并计算胴体各部位间的尺寸比例关系;
(3)扩大样本量并重复步骤A和步骤B,获得同一品种的各等级胴体各部位的尺寸关系函数;
(4)重复步骤A至步骤C,获得各品种的各等级胴体的尺寸关系函数;
(5)通过轨道秤在胴体运输中获得胴体质量信息;
(6)对胴体固定后,通过相机拍摄或红外扫描获得胴体轮廓尺寸信息,并提取胴体长度与宽度信息;
(7)结合胴体品种、自动获取胴体质量和长度对胴体进行分级;
(8)将胴体长宽结合同等级的胴体各部位的尺寸关系函数计算获得胴体详细尺寸;
(9)根据胴体详细尺寸规划五花肉轮廓切割路径、五花肉分割路径、肋排分割路径、前段分割路径以及脊骨分割路径;
(10)将切割路径输入切割机器人,按如下顺序依次执行胴体分割并获得所需部分:五花肉轮廓切割、五花肉分割获得五花肉、肋排分割获得肋排、前段分割获得前段、脊骨分割获得脊骨和后段。
该分割方法在生产中,无需对中段肉进一步分割处理,即可分别获得五花肉、肋排与脊骨三部分。由于猪分割车间会集中分割同一品种猪,因此在常规情况下胴体品种可视为不变,而胴体质量与尺寸均可在运输和分割过程中自动获取,因此采用本发明提供的猪半胴体智能分割方法的猪胴体智能分割设备能够实现自动化切割,主要具有以下优点:1)操作简便,可自动提取切割所需信息,无需人工辅助;2)高切割精度,可针对性规划每片半胴体最佳切割路径;3)高分割效率,能在三段分割的同时完成中段胴体分割;4)高分割利益,将前后段五花肉同中段五花肉完整分割,增加五花肉产量。在猪胴体分割加工中具有极高的实用价值,可以大大推动产业进步。
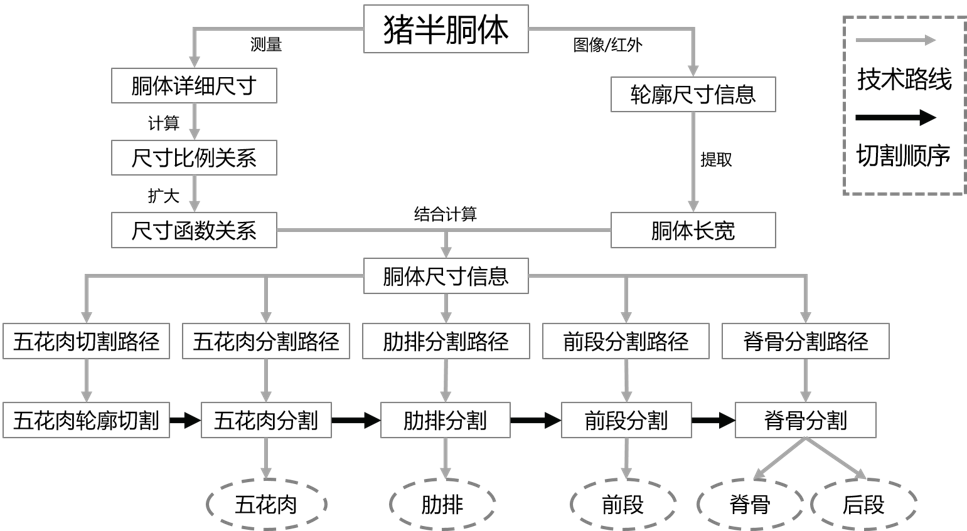
猪胴体智能化分割方法
胴体固定装置研制
夹持装置由底座、轴承支座、活动夹板销轴、连接耳、活动夹板、固定板、夹持支架支承臂、夹持支架主轴、夹持支架回转臂、行程开关、气缸销轴、气缸活塞杆、气缸体气缸固定支架组成,其特征在于:所述的轴承支座、固定板及气缸固定架均焊接于底座上,夹持支架支承臂与焊接于活动夹板上的连接耳通过活动夹板销轴连接,夹持支架回转臂与气缸活塞杆通过气缸销轴连接,夹持支架主轴在两端通过轴承与轴承支座连接,活动夹板及固定板用于夹持固定胴体的表面为凹凸不平网状的结构,气缸为双作用气缸,气缸活塞杆前端安装有位置可调的行程开关。
该夹持装置(下图)夹持支架回转臂在双作用气缸推或拉的作用下,可以绕其主轴带转动夹持支架支承臂及活动夹板转动,活动夹板在支承臂推力作用下又可以绕着活动夹板销轴转动,以保证猪胴体被夹持固定时活动夹板与固定板平行、接触面最大且受正向压力作用;活动夹板及固定板表面凹凸不平的网状结构能增大与猪胴体表面的摩擦,避免其滑动;行程开关位置可调,可保证胴体被有效夹持固定的同时,避免双作用气缸活塞杆超程而损坏装置;具有结构简单、调整维护方便、夹持固定可靠、成本低廉、使用寿命长等优点。
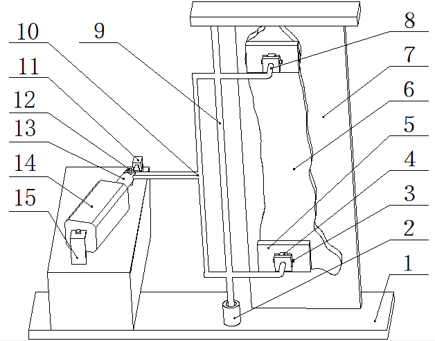
猪半胴体分割作业用夹持装置结构示意图
(1. 底座;2. 轴承支座;3. 活动夹板销轴;4. 连接耳;5. 活动夹板;6. 固定板;7. 夹持支架支承臂;9. 夹持支架主轴;10. 夹持支架回转臂;11. 行程开关;12. 气缸销轴;13. 气缸活塞杆;14. 气缸体;15. 气缸固定架)
猪胴体中段骨肉分割装备
如图所示,猪胴体中段骨肉分割装备由固定底座、Z轴(竖直)方向运动刀架、X轴(水平)方向运动刀架、Y轴(前后或深度)方向运动刀架、五花轮廓切割刀、骨肉分离切割刀、猪胴体夹持支架、分割肉传送带组成,其特征在于:所述的X轴、Y轴和Z轴方向运动刀架皆由丝杠驱动、导轨导向,五花轮廓切割刀为双边开刃的尖刀,装在Y轴方向运动刀架的末端,骨肉分离切割刀为平面刀,五花轮廓切割刀可作前后运动,Y轴方向运动刀架与骨肉分离切割刀并排安装在X轴方向运动刀架上,两者间的距离略大于胴体宽度,并可随其左右运动,X轴方向运动刀架安装在可作上下运动的Z轴方向运动的刀架上,X轴、Y轴和Z轴方向运动刀架可同时做不同方向运动。
该设备优势在于,猪胴体中段骨肉分割装备,猪胴体被夹持支架固定后,在X轴、Y轴和Z轴方向运动刀架协同作用下,先由五花轮廓切割刀切出五花肉的轮廓,再由骨肉分离切割刀将五花肉和外脊肉切下,并由分割肉传送带运输出去做进一步的加工或包装;具有结构简单、调整方便、作业工序紧凑、使用维护成本低廉等优点

猪胴体中段骨肉分割装备结构示意图
(1.高度方向导轨 2.高度方向丝杠 3.高度方向运动刀架 4.长度方向运动刀架 5.长度方向导轨 6.长度方向丝杠 7.五花轮廓切割刀 8.深度方向丝杠 9.深度方向导轨 10.五花与肋骨分离切割刀 11.深度方向运动刀架 12.猪胴体 13.猪胴体夹持支架 14.分割肉传送带 15. 固定底座)
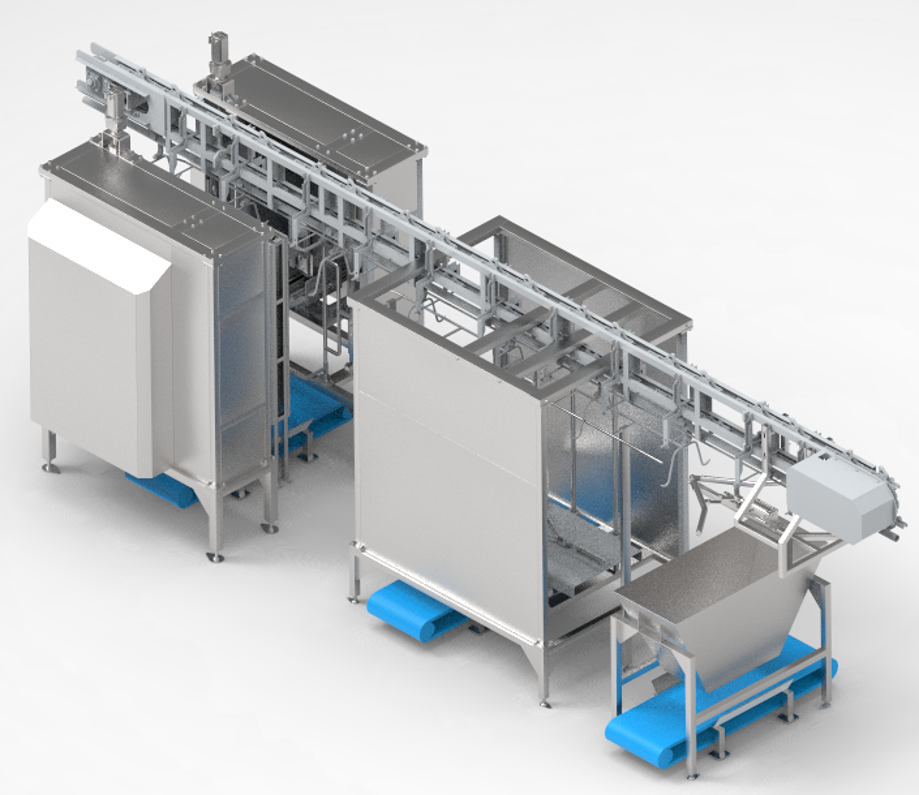
猪半胴体智能化自动分割方法创制
基于上述胴体固定装置及中段骨肉分割装置,项目组进一步开发了剪切式胴体三段分割装置,并将以上装置集成为一种猪半胴体智能化自动分割方法,提供能依据胴体形状、自动判别五花肉的外形轮廓范围,一次性完成猪胴体中段的五花与肋骨、外脊肉与脊骨、肋骨与脊骨和前腿与后腿自动分割作业的装备,以提高猪胴体分割效率及自动化程度、降低企业生产成本。具体如图所示。
系统包括轨道、PLC控制系统、胴体固定装置、图像采集与数据分析装置、五花肉分割装置、胴体三段分割装置、分割肉输送装置及机架。工厂中用于将猪半胴体吊挂在轨道上的设备可选用单钩或扁担钩。胴体固定装置通过按压板将猪半胴体的臀部和肩部固定在尼龙板上,按压板可采用气缸驱动。图像采集与数据分析装置包括工业相机、图像分析系统和轨迹规划系统,分别采集猪半胴体外皮侧和背侧图像,处理后获得胴体尺寸信息,规划切割轨迹并传送至PLC控制系统
五花肉分割装置包括三轴机械臂运动装置,刀具分别安装在Z轴输出端上,主要包括水平轮廓切割刀具、竖直轮廓切割刀具和五花肉骨肉分割刀具。胴体三段分割装置包括升降装置、驱动装置和液压剪,液压剪63的剪切长度为480毫米,升降装置精准控制液压剪的高度。该自动分割系统根据工厂需要选择单台设备或两台设备对称使用。
如视频所示,猪半胴体智能化自动分割方法的流程图,主要包括图像采集及数据分析、五花肉自动切割和三段自动分割三部分。该自动分割方法通过巧妙使用弹簧刀结构实现了五花肉的智能化骨肉分割,解决了五花肉骨肉分割中肋骨曲度复杂的问题。
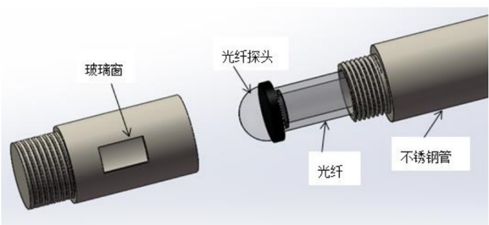
探针结构示意图
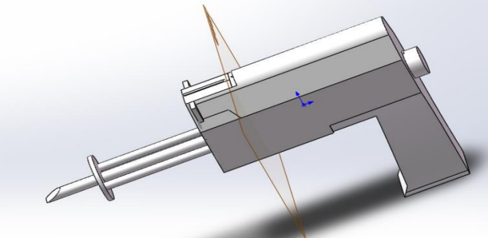
手持式测定仪三维图
基于近红外光的探针式猪胴体肥瘦率检测系统

第三、四根肋骨处肉块
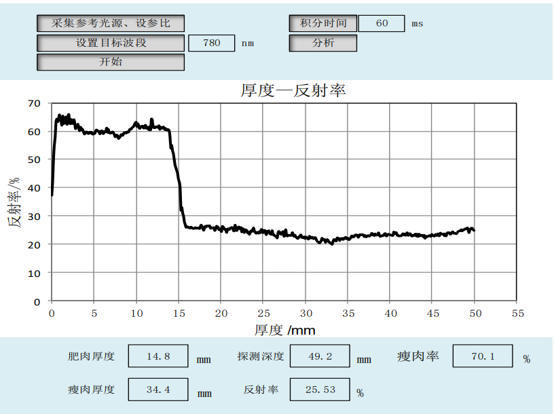
第三、四根肋骨处肉块

五花肉样品
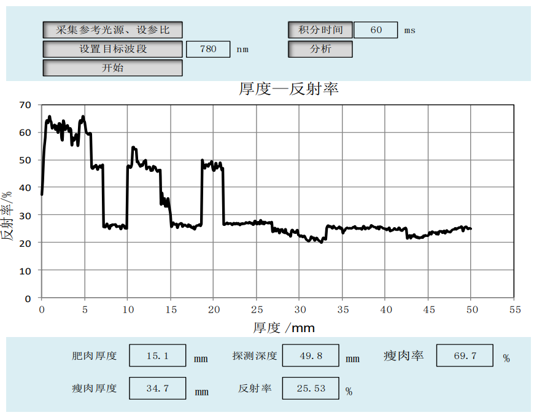
五花肉实验